| Figure 1: Time-Point discretization : this picture comes from the PhD Thesis |
Planning and Fast Re-Planning of safe motionswork of LENGAGNE Sébastien during his Ph-D : 2006-2009 |
This work was done during the Ph-D of Sébastien LENGAGNE under the supervision of Philippe FRAISSE and Nacim RAMDANI, in the DEMAR Team Project of the INRIA. The team is located at the LIRMM. The DEMAR Team Project aims at restoring movements of paralized limbs.
The Ph-D goals were to develop methods to generate safe motions for the standing up and the walking of paraplegian people. Nevertheless, the application to paraplegian was not possible yet, and we apply our method to the HOAP-3 robot. We showed how to generate safe motions for its deambulation.
Humanoid robots are very complex systems, with heavy models. The best way to compute accurate motions is to do off-line motion planning. This method allows to have a benchmark motion which ensures the safety and the balance of the robot. During on-line running, the benchmark motion is coupled with a control system to deal with unpredicted events. Indeed, since the motion is computed off-line, it is adapted to one situation.
During the Ph-D, the dynamic model of the HOAP-3 robot was used to plan the motions of the limbs (12 degrees of freedom).
Motion planning can be translated into finding the best joint trajectories q(t) that solve this problem :
|
Where :
This problem is called an infinite programming problem, because the joint trajectories and the inequality constraint can be decomposed into an infinite set of values.
There is no tool to solve directly the infinite programming problem. Therefore, we need to parametrize the joint trajectories to get a finite set of parameters to topimize. In this case, we use a Bsplines parametrization, and we get :
| qi(t) = |
| pi,j × Bj(t) |
By this way, we have to optimize the parameter vector : X = [p1,1,p1,2,...pi,j, T] with T the motion duration. The motion planning problem becomes :
|
This problem is defined as a Semi-Infinite Programming problem (SIP problem), since there is a finite number of parameters that must satisfy a set of continuous constraints which can be decomposed into an infinite set of values. Currently, there is no algorithm that can solve the SIP problem, thus we need to discretize the inequality constraints functions.
The usual method to do the discretization is to consider a time-grid T, and to compute the constraint value for the time value of the grid. This formulation leads to the following expression of the inequality constraints :
| ∀ i, ∀ tk ∈ T gi(X,tk) ≤ 0 |
with T = {t0 = 0, t1,...,tN−1,tN = T}.
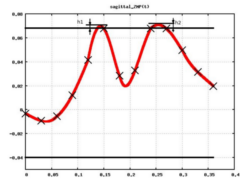
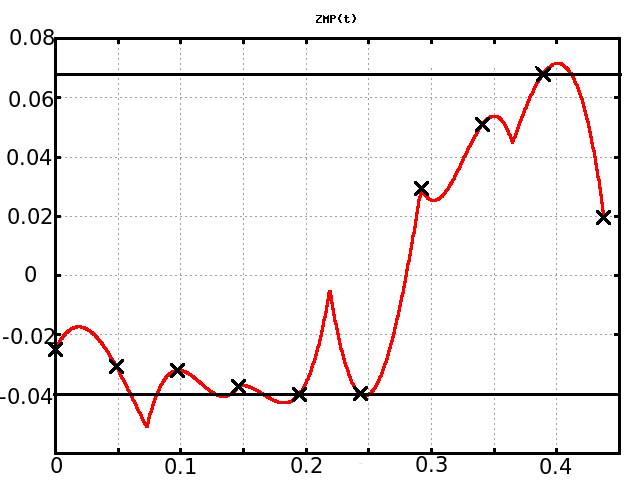
Figure 1: Time-Point discretization : this picture comes from the PhD Thesis
The Figure 1, shows a result of a motion planning process with a time-point discretization. The represented function is the ZMP of the HOAP-3 robot in the sagital plane that translates the balance of the robot. To ensure the safety of the robot, this function must stay with [-0.04;0.068].
The crosses represented the value of the function that are taken into account to evaluate the safety. These values stay within the limits but it is clear that the continuous function comes out from the limits. We illustrate this constraint violation with the following video.
So, we see that the time-point discretization does not allow to generate safe motions for the humanoid robot.
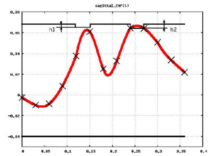
To plan safe motions we proposed the guaranteed discretization method which consists in evaluating the maximum and the minimum of the function over time-interval (see Figure 2)

Figure 2: Time-Point discretization : this picture comes from the PhD Thesis
So we transform the expression of the inequality constraints and obtain :
|
We use the Interval Analysis to get a conservative estimation of the maximum and minimium values. Therefore, the optimization problem gets range of the continuous functions and can produce a solution without any constraint violation. We implemented it on the HOAP-3 robot to get the following experiments :
This method ensures the security of the robot, but the CPU-time is too high ( more than 20 hours see the Ph-D report). We had to find a faster method to ensure the constraint validity.
We proposed the Hybrid Motion Planning Method which aims at producing safe motions in the same range of CPU-time as classical motion planning (which are not safe).
This method is iterative and follows this algorithm
|
|
|
This method allows to create a database of motions that was used to realize this experiment with the HOAP-3 Robot (more details in Sebastien LENGAGNE’s website).
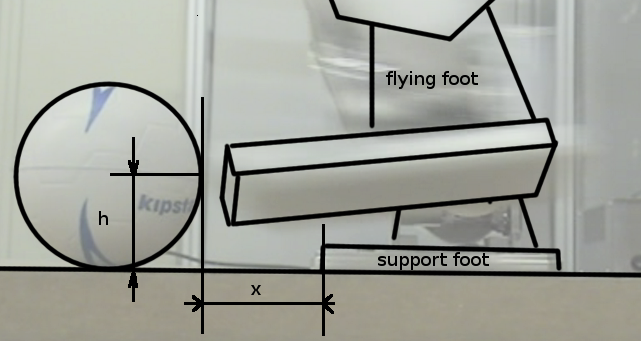
We optimized a kicking motion thanks to hybrid motion planning method. We characterize this motion by the position (x,h) of the foot at the mid-duration time which corresponds to the impact, such as shown in Figure 6
We generated a kicking motion while assuming the location of the ball at x = 1cm and h = 3cm. We present the impact we obtain on Figure 7


before collision collision after collision
Figure 7: Optimal kicking motion with a ball position x=1cm


before collision collision after collision
Figure 8: Optimal kicking motion with a ball position x=3cm
This video shows the optimal kicking motion for the two ball positions (x = 1cm on the left and x = 3cm on the right). We can see that the left kicking makes the ball to get faster.
To compute a new moton adapted to the current ball position, we introduce a method which modifies the previous optimal kicking motion, in a very small CPU time while ensuring constraint satisfaction.
Our idea is to replace the set of inequality constraint ∀ t ∈ [0,T], g(X,t) < 0, which is time consumming, by a set of bounds on the parameter X ∈ [X], when [X] is the feasible set of parameters. This way, re-planning consists in an optimization process with only bounds on the parameters, the new equality constraints hk ′ and possibly the cost function J′.
|
Where hk′ (X) is the new set of equality constraint which will translate the new position x=3cm of the ball.
We propose the CFSS Algorithm (Computation of Feasible Sub-set) that will compute a feasible sub-set [X] that contains the optimal vector X and satisfy all the inequality constraint functions.
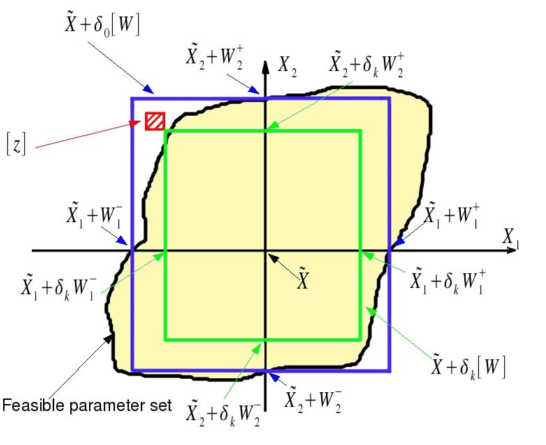
The algorithm starts by computing the interval vector [Wi ], by using the distance between the optimal vector X and the first constraint violation along each direction such as presented in Figure 9. Then it contracts this interval vector by searching [z] a box that violates at least one constraint and reject it, by decreasing δk :
|
Once the software finds a solution, [z], it stops and δ is chosen such as:
| [z] ⋂ X + δk+1 [W] = ∅ |
When it cannot find a solution of [z], then it finishes with the as large as possible sub-set [Xi]
On Figure 10, we can see that the sub-set [X] is not as large as possible, it could be extend in X1+ or X2− directions.
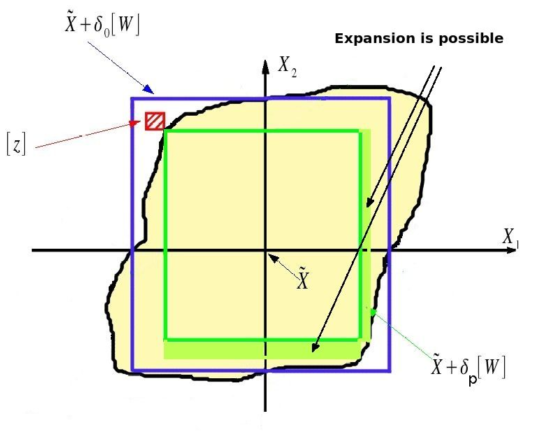
Figure 10: Example of the expansion process. The final sub-set [X] rely on the order of the expansion.
The second step is to expand the feasible sub-set in all the direction. Nevertheless, the user will have to specify the order of the expansions. (the order will impact the result).
We choose to re-plan the optimal motion to make the robot kick a ball at 3cm high and located at the position x = 3cm. Figure shows the faisable impact position (x,h) for the feasible sub-set [X]
We can see, that the position (x = 3cm, h = 3cm) is in the feasible set.Thus, we proceed to the optimization of the problem :
| (1) |
The optimization software spent 1.5 second of CPU time to find a solution X. The re-planned motion is presented on Figure 11, the impact is at the desired position (x = 3cm, h=3cm).
This video shows a kicking motion adapted to a ball position of 1cm (on the left) and apply this motion with a ball at 3cm (on the right) for the HOAP-3 Robot and a replanned motion adapted to a ball placed at 3 cm. We can see that the kicking on the left is better than the one on the middle since the position of the ball is the one expected. The kicking on the right is also better since it was replanned to fit with the ball position x = 3cm.
[Humanoids2007] : S.Lengagne, N.Ramdani, P.Fraisse (2007) Guaranteed computation of constraints for safe path planning
IEEE International Conference on Humanoid Robots, Humanoids 2007, Pittsburg, PA, USA. pp. 312-317 download
[Humanoids2008] : S.Lengagne, N.Ramdani, P.Fraisse (2008)
A new method for generating safe motions for humanoid robots
IEEE International Conference on Humanoid Robots, Humanoids 2008, Korea South. pp.105-110 download
[ICRA2009] :S.Lengagne, N.Ramdani, P.Fraisse (2009)
Safe motion planning computation for databasing balanced movement of Humanoid Robots
IEEE International Conference on Robotics and Automation, ICRA 2009, Kobe, Japan. pp. 1669-1674.download
[IROS2009] :S.Lengagne, N.Ramdani, P.Fraisse (2009)
Planning and Fast Re-Planning of Safe Motions for Humanoid Robots : Application to a Kicking Motion
2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St Louis, MO, USA. Finalist Robocup Best Paper Award download
Ph-D Thesis of Sébastien Lengagne (in french) download
In the download files we will consider a simple model to explain our methods. This model is also implemented in the safe_motion_planning file.
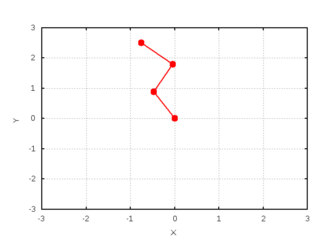
We consider a 2-D robot with three links such as showed here :
|
|
We want to compute a motion for which, the effector starts at the position (x = -0.75,y = 2.5) and finishes at (x = 0.75,y = 2.5) and computes the feasible sub-set around this motion.
All the files are available here.
We can download three tar-files which contains the C++ files :
This document was translated from LATEX by HEVEA.